Architecture
Let's take a quick look at Obi's core components and the role they play:
ObiSolver
A solver is a component that physically simulates all actors found inside its hierarchy. You can choose between multiple backends to perform the simulation. Solvers expose a few global simulation parameters such as gravity, inertia scale, velocity damping, or constraint settings.
ObiActorBlueprint
A blueprint is an asset that stores a bunch of particles and constraints. It does not perform any simulation or rendering by itself. It's just a data container, not unlike a texture or an audio file. Blueprints are generated from meshes (ObiCloth and ObiSoftbody), curves (ObiRope) or material definitions (ObiFluid).
ObiActor
An actor is a component that instantiates a blueprint inside a solver. All actors must be children of a solver. Multiple actors can share the same blueprint, in fact reusing the same blueprint as much as possible is encouraged. Examples of actors are a rope, a flag, a bouncy jelly, or a water emitter.
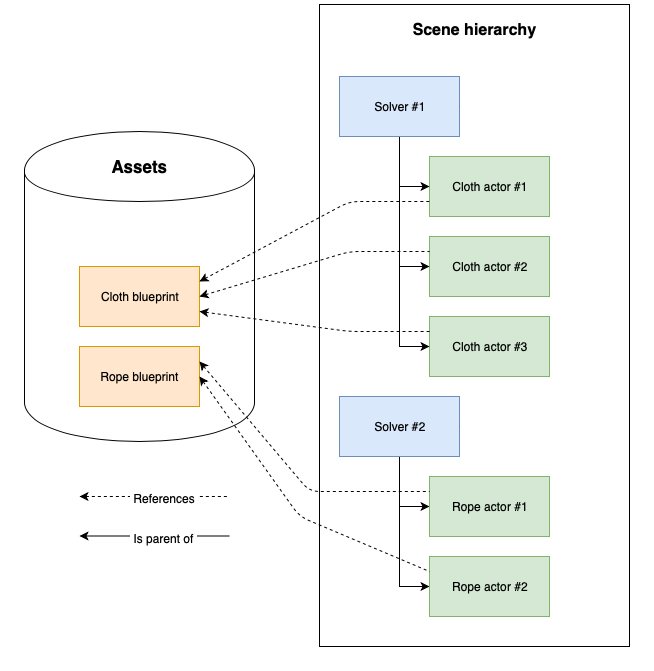
Here's a diagram showing a scene with two solvers: one simulating 3 identical cloth pieces, and another one simulating 2 identical ropes:
Each solver maintains several lists or per-particle properties: positions, velocities, radii, etc. Initially, these lists are empty. Whenever a new actor is added to a solver, these steps take place:
- The actor asks the solver to allocate as many particles as needed by the blueprint. The solver maintains a list of free indices in its internal arrays, and will assign each particle the first free index it can find. This index becomes the particle's solver index. When removing actors from the solver, gaps will appear in the solver's internal particle arrays. Because of this, particles belonging to the same actor might not be adjacent in the solver arrays. A particle with actor index 0 (first particle in the actor's blueprint) might end up in solver index 194, if the first 194 (0-193) particle indices have been allocated.
- The actor makes a copy of all constraints found in the blueprint, and updates their particle references so that they point to the correct solver array positions.
- The number of active particles in the solver is updated.
Once an actor has been added to a solver, it is included in the simulation.