Particle attachments
Quite often you´ll want to "glue" part of a ObiActor (rope, cloth or softbody) to another object. This can be easily achieved by using an attachment.
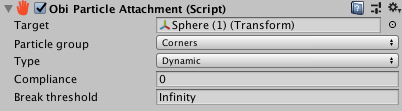
To create an attachment, select the actor you want to attach and look for ObiParticleAttachment in the Add Component menu. All attachments take two inputs:
- Target
- Transform we want to attach the actor to.
- Particle group
- The particle group you want to keep attached to the target. For cloth and softbodies, you can define new particle groups in the blueprint editor. Ropes and rods automatically generate a new group for each control point in the blueprint's path.
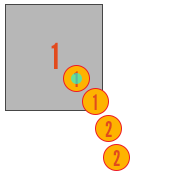
It's important to realize that attachments do not move the particle group to the position of the target object, nor the target object to the position of the particle group. Moving the particle group to the target's position would collapse all particles into a single point, and would result in a kickback effect once the particles spring back to their original positions. Moving the target could cause a whole palette of issues depending on your game logic.
Instead, particles in the group are attached at their current position relative to the target object. This makes it simple to work with multiple particles, and ensures smooth attachments with no initial "jumps" or sudden motions.
If you want particles attached at a specific position other than their position at the time of creating the attachment, you can set their position at runtime before creating the attachment: see scripting particles.
Static vs Dynamic
There's two types of attachment, that behave very differently: static and dynamic.
Static attachments

Static attachments entirely deactivate dynamics for the particles in the group, and drive them using the target transform instead. You can think of this as parenting the particles to the target. This is very inexpensive and ensures perfect attachments that do not drift or separate.
However, since no dynamics are involved in a static attachment -no forces, velocities or accelerations-, statically attaching an actor to a rigidbody will cause the actor to blindy follow the rigidbody's transform. The rigidbody will behave exactly in the same way it would if no actor was attached to it. The technical name for this kind of behavior is one-way coupling.
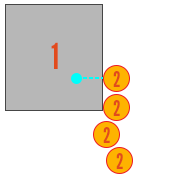
Dynamic attachments
By using dynamic attachments, you allow the particles to be fully simulated and exchange impulses with rigidbodies. This means the actor will be affected by the rigidbody's movements, and the rigidbody will in turn be affected by the actor. The technical name for this kind of behavior is two-way coupling.
Internally, dynamic attachments use pin constraints. Read the pin constraints section for a bit more info on pin constraints.
Dynamic attachments have a couple of extra parameters:
- Compliance
- Constraint compliance in meters/Newton. A value of zero will strive to make the attachment as rigid as possible, given the current simulation budget (timestep size and pin constraint iteration count). High values will make the attachment more flexible.
- Break threshold
- Maximum force (in Newtons) that the attachment can resist without breaking.
Attachments inside colliders
When attaching a particle very close to or inside a collider (so that they overlap), if you have collision constraints enabled you can encounter a situation in which the attachment and collisions fight each other. This results in jittering and/or an undesired offset in the attachment position, because particles cannot simultaneously be inside and outside the collider. If the attachment is dynamic, results will be even worse as this setup causes a force feedback loop between the particles and the rigibody with largely undefined behavior.
The solution is to use categories and masks to filter out collisions between the pinned particle and the collider. See the collisions page for more information on how to set up collision filtering. By setting the particles and collider to different categories and disallowing collisions between them, no contacts will be generated between them and collisions will not interfere with attachments.